NxT-Arduino マニュアル
起動方法はとてもシンプルです。
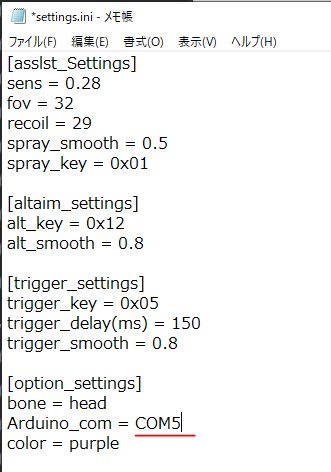
NxT-MIRAI.exeとSettings.iniを同じフォルダに配置されている必要があります。
ローダーを起動し、ライセンスキーを入力し、Enterキーを押します。
ライセンスキー入力後は、現在の設定が表示された後ローダーが自動的に落ちますがエラーではありません。(実際はこの後にビープ音が鳴ります)
これはハイドコンソールという機能でタスクバーに表示させないようにする機能です。
ゲーム起動中でも設定変更することができます。
F12を押すとビープ音と共にソフトウェアが終了するので、 Settings.ini をメモ帳等で開いて設定変更し、上書き保存してから NxT-MIRAI.exeを管理者として実行してください。
| 機能名 | 設定方法 |
|---|---|
| sens | ゲーム内感度を記入します。0.33なら0.33と記入します。 |
| fov | arduinoが動作する横範囲です。数値が大きいほど範囲が広くなります。 |
| recoil | RCSの強度 |
| spray_smooth | AIMの滑らかさです。数値を上げるほど強くなります。基本は0.なんとかです。 |
| spray_key | Microsoftの仮想キーコードです。(AIMキー) |
| alt_key | Microsoftの仮想キーコードです。 |
| alt_smooth | spkeyが左クリックに割り当てていない人専用の機能です。RCSがないエイムボットです。この機能を使えば射撃をしていないのにリコイルが始まるといったことがなくなります。spkeyが左クリックの方は使わない適当なキーにでも割り当てておいてください。 |
| trigger_key | Microsoftの仮想キーコードです。 |
| trigger_delay(ms) | トリガーボットが動作するまでの遅延です。ただし設定した数値からランダムに数値が引かれるため、250に設定しても250ではなく242など毎秒ランダムに変わります。(安全性を上げるため) |
| trigger_smooth | トリガーの滑らかさです。従来のトリガーボットと違いターゲットに吸い付くので、吸い付きの強さを変更できます。 |
| bone | 吸い付く部位です。 body = 胴体 head = 頭 AIM = RCSオフ、頭に吸い付く。 |
| Arduino_com | arduinoのcomを正しく記入しないとローダーは起動しません。しっかり合わせてください。下の方に確認方法を確認します。記入するときはCOMを必ず大文字で! |
| color | ターゲットの色です。purpleは紫、yellowは黄色です。 赤には対応していません。(これはarduinoの質を向上させるためです) |
エラー 一覧
| エラー内容 | 対処法 |
|---|---|
| キー入力後ローダーが落ちる | Setting.ini が間違っているか、COMが間違っています。正しく入力してください。 |
エイムキー割り当て
下記サイトを参考に、エイムキーを割り当ててください
仮想キーコード (Winuser.h) - Win32 apps
COM確認方法
- デバイスマネージャーを開きます。(Windowsの検索欄で「デバイスマネージャ」と検索してください)
- 下の方にある「ポート(COM と LPT)」の項目に行きます。
- USB シリアル デバイスの横に書いてあるものがarduinoのCOMです。 (大体COM3かCOM5)
- それをsettings.ini のcomportの部分に記入します。

製品リピート および 再導入について
製品をリピート(延長)いただく際には遠隔操作は不要です。
- key.ini を削除
- ローダーを管理者として実行
- ライセンスキーを入力し Enter
同じ arduinoボード、同じマウス構成であれば PCを変えたり クリーンインストールしても 再導入は不要です。
異なる マウスへの再導入 または arduinoボードのリセット(マウス Spfの解除)は 一律¥2,000 にて承ります。